Add a new page:
Add a new page:
This is an old revision of the document!
see also Lagrangian Formalism
In Lagrangian mechanics we define a quantity \begin{equation} L\equiv K(t)-V(q(t)) \end{equation} called the Lagrangian. In addition, for any trajectory $q$ with $q(t_0)=a$, $q(t_1)=b$, we we define the corresponding action \begin{equation} S(q)\equiv \int_{t_0}^{t_1}L(t)\,dt. \end{equation}
The basic idea is now that nature causes particles to follow the trajectories with the least amount of action.
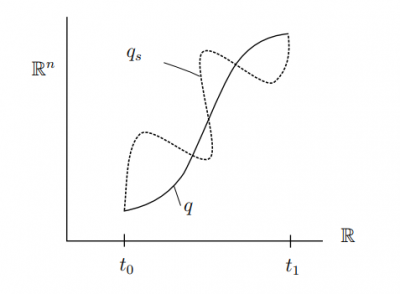
In the image on the right-hand side this could be the solid line denotes by $q$. Another path is shown as a dashed line and denoted by $q(s)$. The Lagrangian approach assigns to each path a quantity called action as defined above and then tells us that the correct path that an object really follows is the path with minimal action. In our example the path $q$ could have an action of $3$ and the path $q_s$ an action of $5$. Hence, path $q$ is correct and not path $q_s$.
The mathematical toolset that we use to find the paths with minima action is known as variational calculus.
The final result using this machinery is that the path with minimal action is the one that satisfies the Euler-Lagrange equations.
Using the Lagrangian approach, we can derive Newtonian mechanics. Alternatively, we can start with Newtonian mechanics and derive Lagrangian mechanics.
Lagrangian mechanics can be formulated geometrically using fibre bundles.
The Lagrangian function is defined on the tangent bundle $T(C)$ of the configuration space $C$.
In contrast, the Hamiltonian function is defined on the cotangent bundle $T^\star(C)$, which is also called phase space.
The map from $T^\star(C) \leftrightarrow T(C)$ is called Legendre transformation.
