Add a new page:
Add a new page:
see also Phase space and Hilbert Space
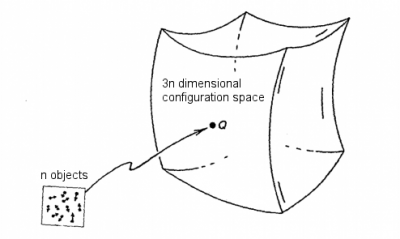
The configuration space or configuration manifold is the collection of all the possible "snapshots" or descriptions that the system can take.
Formulated differently, the configuration space is the possible "positions" of a mechanical system. Take note that the states of motion, eg. velocities/momenta are not part of the configuration space. This is in contrast to the phase space, where we also take the states of motion into account.
The state of a system is recorded in a configuration space point through all the locations that the objects in the system have at a given point in time.
The time evolution of a system can then be represented as a path in configuration space.
Each point of the configuration space represents one configuration our system can be in. For example, each specific way a double pendulum can be arranged is a point in our configuration space. The total configuration space consists of all possible configurations.
The simplest example is an object moving in just one dimension. The configuration space is just a line, i.e. $\mathbb{R}$. Now, if we want to describe two objects which move in one dimension, we have two choices. Either we describe them using two location vectors:
$$ \vec{r}_1 = (f(x)), \quad \vec{r}_2 = (g(x)) $$
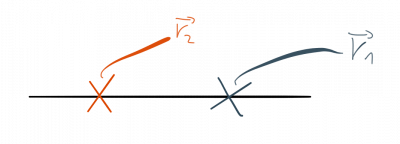
or we glue the configuration spaces of the two objects together to one big configuration space and then only keep track of one location in this total configuration space:
$$ \vec{r} = (f(x),g(x)). $$
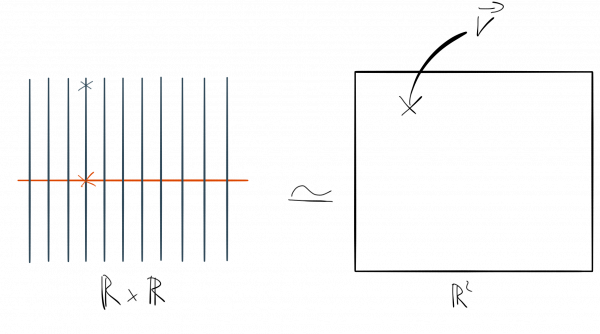
When we glue two lines together we get a rectangle. At each possible location of the first object, we need to take into account the possibility that the second object could be anywhere. Hence we need a complete copy of $\mathbb{R}$ at each location of $\mathbb{R}$. Gluing a copy of $\mathbb{R}$ to each point of $\mathbb{R}$ yields a rectangle. Such a construction is known as a product space.

Another good example is the pendulum. The total configuration space of a pendulum swinging just in two dimensions is a circle $S^1$, since a pendulum can swing once around its suspension. The configuration space of a pendulum swinging in 3-dimensions is the sphere $S^2$.
This is useful, since now we can describe our system in terms of paths in the configuration space. The system starts in one specific configuration, which corresponds to one point in the configuration space. Then as it evolves this point starts moving around in configuration space. Thus, we only need to keep track of how this one point moves around.
In contrast, for example, for a double pendulum in the traditional language we would need to keep track of the exact positions of the two pendulums.
No matter how many particles or objects there are in our system, each specific configuration is exactly one point in our configuration space.
Any set of parameters which can characterize the position of a mechanical system may be chosen as a suitable set of coordinates. They are called the "generalized coordinates" of the system and are the coordinates of the configuration manifold.
Further Examples
Each point in this space $\mathbb{R}^9$ corresponds to one specific configuration of our 3 particle system.
The 3 particles trace out continuous trajectories through $\mathbb{R}^3$, but the whole system can be said to trace out a continuous path through $\mathbb{R}^9$. So instead of three trajectories through $\mathbb{R}^3$ we now only have to track one trajectory through $\mathbb{R}^9$.
References
